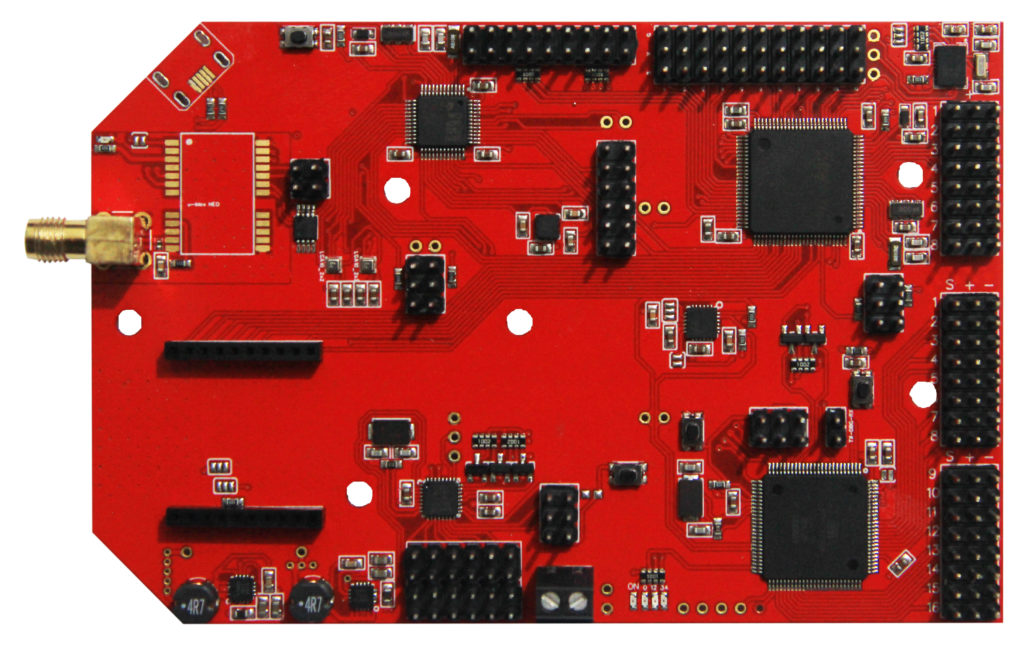
İHA UÇUŞ KONTROLÖRÜ
Genel Özellikler
֎ Kontrolcü hiç bir parametre değişikliği yapılmadan, motor, pervane ve batarya voltajı farketmeksizin tüm İHA’larda kullanılma özelliğine sahiptir.
֎ Motorlar çalıştığı andan itibaren uçuş parametrelerini canlı olarak güncellemekte ve bu sayede maksimum performans vermektedir.
֎ Kullanılan algoritmalar dünya üzerinde kullanılmakta olan pozisyon, yükseklik ve yön koruma algoritmalarından tamamen bağımsız geliştirilmiştir.
֎ Ürünümüz devre kartı üzerindeki GPS ve sensörlere ek olarak ekstra veya yedekli GPS ve sensörler eklenebilecek şekilde tasarlanmıştır. Ekstra veya yedek olarak 2 GPS, 4 pusula, 2 giroskop, 4 ivmeölçer eklenebilir.
֎ Çoklu kamerayı destekleyebilecek kanal seçici, zum ve gimbal kontrolörü için çıkışlar bulunmaktadır.
֎ Maksimum 8 kanallı PWM, PPM ve SBUS tabanlı klasik kumandalara ilave olarak 48 km menzilli ZigBee tabanlı kumandayı da desteklemektedir.
֎ 6 yönlü ultrasonik mesafe sensörlerini desteklemektedir.
Çalışma Alanları
֎ Arama – kurtarma, belirli bir alanı tarama, elektrik veya doğal gaz hatlarında arıza tespiti, kargo alma – bırakma, devriye gibi görevler için 100 den fazla koordinat ve her koordinatta 10 dan fazla görev alabilir. Bu görevler piyasadaki ürünlerdeki ayakları açma kapama, kamera oynatma, fotoğraf çekme vs. gibi seçeneklerle sınırlı değildir. Ürünümüzde bu özelliklere ek olarak
֎ Acil durumda paraşüt açma
֎ Yük bırakma – alma
֎ Yer ünitesinde el değmeden şarj olma
֎ Gövdeye bağlı LED leri sinyalize etme
֎ Havadaki nem ve sıcaklık verisini depolama
֎ Gövdede Tilt-Rotor özelliği mevcut ise mod değiştirme
֎ Etrafındaki İHA’lar ile sürü halinde hareket etme (32 cihaza kadar – arttırılabilir)
֎ Sürü halinde hareket ederken senkronize fotoğraf çekme ve haritalandırma
֎ Gövdede yeterlilik varsa sürü ile hareket ederken araziyi topografrik ölçümlendirme gibi bir çok görev eklenebilir.
Bunlara da ek olarak olası bir arıza, sinyal kaybı veya görev gerekliliği durumunda
֎ Kumandaya belirlenmiş bir mesafeye
֎ Görev öncesinde seçilmiş güvenli bölgelere
֎ Yer ünitesine
acil iniş yapabilir veya göreve programlanmış olarak da iniş yapabilir.
Sayısal Detaylar
Denge Hesaplamaları: 300 Hz
Pozisyon Koruma 40 Hz
Altimetre 50 Hz
Yön Koruma 110 Hz
Telemetri 4-20 Hz
Ultrasonik Mesafe Ölçümü 1-60 Hz
Minimum Kalkış Süresi 4 sn
Optimum Kalkış Süresi 16 sn
Temel Giriş ve Çıkışlar
Kumanda kanalları 8 kanal
Motor ve Servo Kanalları 16 kanal
Opsiyonel Giriş ve Çıkışlar
Gimbal 3 kanal
PWM (Paraşüt Ayak vs.) 8 kanal
Dijital Çıkışlar 3-14 kanal
LED çıkışı 4 adet